
RC Helicopter Controls
- Cyclic, Collective & Yaw explained
Learning about rc helicopter controls is a fundamental part of the radio control heli hobby, but it can be difficult understanding the different pitch controls (cyclic vs. collective) and how everything interacts.
 Hopefully this article will sort that out for you, if you've been scratching your head about it!
Hopefully this article will sort that out for you, if you've been scratching your head about it!
Getting a firm knowledge of the controls of an rc helicopter will give you a sure footing in your early days of learning to fly one, so it's well worth taking the time to get your head round how everything works.
Let's start with understanding pitch...
The primary method of making a real helicopter change direction while flying is through full pitch control of the main rotor blades, either independently or collectively.
But in the radio control flying world, there are many electric rc helicopters that do not have this complete independent pitch control. These are known as fixed pitch (FP) rc helicopters and have proven to be very popular with beginners.
Emulating the real helicopters are the more complex collective pitch (CP) models which, although harder to learn on, are more agile and smoother to fly because the rc helicopter controls found on them are truer to life.
FP v. CP Helicopter Control
To control a helicopter the pitch angle of the main rotor blades must be changed in relation to the air flowing over them. This change varies the amount of lift generated by the blades.
Pitch angle is referred to as Angle of Attack when the blade is moving through the air.
Main rotor blade control comes in two forms, cyclic and collective.
Cyclic controls directional movement of the helicopter (left, right, back and forward) whilst collective controls altitude (up, down).
Cyclic control changes the pitch angle of the whole rotor disc, which is the imaginary circle drawn in the air by the tips of the spinning blades. Imagine a dinner plate spinning round on a pole, and tilting up and down slightly as it spins - this is effectively what the rotor disc does when cyclic control is applied.
The rotor disc movement is also affected (helped) by the flybar*, a short bar perpendicular to the main rotor blades.
At each end of the flybar is an airfoil paddle. The flybar moves in direct response to the tilting of the swashplate, which is controlled by the servos. A flybar also acts to stabilise the helicopter in flight.
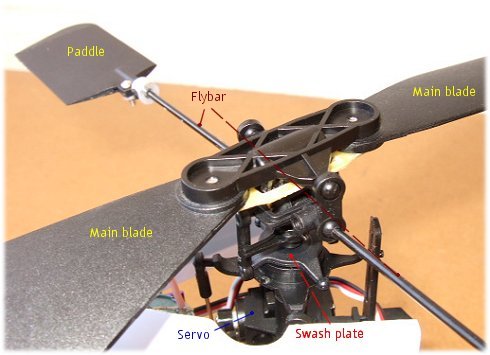
Above: the rotor head assembly of a fixed pitch rc helicopter.
As the flybar rotates in response to the tilting swashplate, so the Angle of Attack of the paddles changes. This effects the amount of lift being generated by them and so they rise and fall accordingly.
The paddles always work against each other i.e. if one rises then the other is forced downwards, and vice versa.
This rise and fall of the paddles exaggerates the movement of the flybar assembly, and the end result is that the whole rotor disc tilts in response to the changes in lift being experienced at the paddles.
As a result of that, the helicopter leans to the side that is experiencing lesser lift, thus changing sideways and/or fore-aft direction.
While flybars have been almost universally used on rc helicopters for many years, flybarless systems are now very common. More on those further down the page.
Incidentally, the terms 'FP' and 'CP' are a little misleading because both terms only refer to the collective pitch control of the helicopter. The cyclic pitch control method is basically the same for FP and CP helicopters.
So, then, the primary difference between fixed pitch and collective pitch rc helicopters is in the collective pitch control.
This is influenced by the lift generated by the main blades acting together i.e. 'collectively'.
On a fixed pitch rc helicopter the main blades are fixed in the main rotor blade holder and cannot be pivoted about their longitudinal axis (twisted).
Altitude, therefore, has to be controlled by the speed of the blades - faster spinning blades generate more lift and vice versa.
The speed of the blades ('head speed') is, of course, controlled by motor speed.
The big problem with fixed pitch altitude control is that of latency. There can be an annoying lag between you moving the throttle stick of your transmitter to change the motor speed, and the change in lift generation happening.
As a result, trying to hold a consistent altitude is very tricky. FP helicopters will often rise and fall repeatedly, despite your best efforts!
On a collective pitch rc helicopter, however, the main blades can be pivoted (twisted) about their longitudinal axis in relation to the rotor head.
This changes the pitch angle of them and hence the associated amounts of lift.
The motor can therefore be kept at a more constant speed, and altitude is controlled by changing the pitch angle of the blades.
This set-up gives much more agile flight performance and better response. Altitude control is so much easier and more precise, compared to an FP heli.
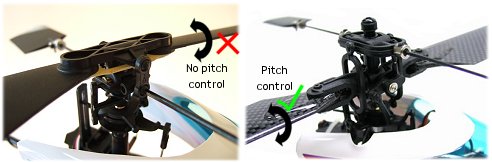
Above left, an FP rotor head compared to the more complex CP one, right.
Collective pitch control is necessary for any form of aerobatic flying, especially inverted flight where negative blade pitch is a necessity.
A fixed pitch rc helicopter, on the other hand, is severely limited in terms of aerobatic capability.
RC Helicopter Controls & Channels
For an rc helicopter to have proper control there needs to be at least 4 channels - left/right cyclic, fore/aft cyclic, left/right yaw and collective pitch and/or throttle.
If these sound confusing, compare them to the 4 primary airplane controls and you'll see the relationship:
| Helicopter Control | Airplane Control | Action |
| left/right cyclic | left/right aileron | roll |
| fore/aft cyclic | elevator/thrust* | airspeed |
| left/right yaw | left/right rudder | yaw |
| collective pitch/throttle | elevator/thrust* | climb/dive |
*NB Airplane elevator and thrust are shown together because
both influence airspeed and climb/descent.
Taking a basic 4-channel FP rc helicopter as an example, there will be 2 servos controlling the cyclic pitch - one for left/right and the other for fore/aft. Main motor speed control and tail rotor motor speed (left/right yaw) will be the other two channels.
Yaw is controlled by the tail rotor and is used in conjunction with, or against, the natural torque force that is generated by the spinning main rotors. (As a natural reaction to the spinning blades, the fuselage of the helicopter will always want to spin in the opposite direction).
The tail rotor generates sideways thrust in the same way as an airplane propeller generates thrust. If the amount of thrust equals the level of torque being generated from the spinning main blades, then the helicopter fuselage won't spin round. If the thrust exceeds the torque, the fuselage will yaw one way and if the torque exceeds the thrust then the fuselage will naturally yaw the other way.
The RC Gyro
 The use of yaw control in rc helicopters is made easier by a gyro which is an electronic device that is connected between the receiver and the tail rotor control (either a servo or small motor).
The use of yaw control in rc helicopters is made easier by a gyro which is an electronic device that is connected between the receiver and the tail rotor control (either a servo or small motor).
The gyro, technically called an accelerometer, senses any rotational movement of the helicopter that isn't a result of a signal to the receiver, and it makes fine and rapid adjustments to the tail rotor speed or blade pitch to suit the torque force at that precise moment, hence dampening out any unwanted yaw.
Gyros make these calculations and corrections at lightning speed, so much so that the pilot doesn't notice anything other than a stable helicopter!
The gyro sensitivity ('gain') can be adjusted by the pilot either directly on the gyro itself or remotely from the transmitter.
Heading Hold Gyros go one step further than a standard gyro by performing more complex calculations to keep the helicopter pointing in the direction that the pilot intended.
A HHG will 'learn' the orientation of the helicopter and maintain this heading until the pilot inputs a definite yaw control that will override the gyro. Once a signal has been received from the transmitter, the gyro learns the new heading and keeps the heli pointing in that direction until a new command is received.
Heading Hold Gyros more or less eliminate unwanted changes of direction forced on the helicopter by wind gusts. The gyro will prevent the helicopter from swinging naturally round in to the wind, in the same way as a weather vane does (the wind pushing on the tail will force the helicopter round in to wind), because it will know that the change in yaw command did not come through the receiver, and so was not made by the pilot. Clever stuff indeed!
HHGs, once an expensive luxury, are now commonplace and almost all rc helicopter gyros have this feature.
RC Helicopter Control Units
 Many smaller rc helicopters use micro-processor controlled printed circuit boards (PCBs) to save space and weight.
Many smaller rc helicopters use micro-processor controlled printed circuit boards (PCBs) to save space and weight.
The PCB-based unit is a device that can potentially (depending on the helicopter type) combine the receiver, gyro and motor electronic speed control (ESC) on electric powered rc helicopters. A further function can be pitch mixing, again depending on the helicopter in question.
Separate components can of course be used, and often are, when the helicopter is big enough to carry the extra weight without problem, but on smaller RTF electric helis, particularly the cheaper fixed pitch models, a 3-in-1 or 4-in-1 control unit is almost always used to save weight and space.
CCPM
CCPM stands for Cyclic/Collective Pitch Mixing and is commonly found on electric powered CP helicopters, where it's sometimes called eCCPM.
The swashplate has three servos controlling it (aileron, elevator and pitch), typically spaced at 120° to each other, and the servos all interact together to control both cyclic and collective pitch as the inputs are made by the pilot.
The mixing is done at the transmitter and a computer radio is needed for this function to be available.
CCPM setup can be quite daunting to the beginner rc helicopter pilot, and it's important that the setting up of the servos is done correctly and well. All servos must match exactly and linkage lengths must also match, so that all servos can work together equally.
My good friend John Salt (rchelicopterfun.com) has produced an excellent e-book 120° & 140° Swashplate Setup and Levelling, which is an excellent (and essential!) resource to have to hand. The e-book really follows on from his even more successful book Setup & Tips For Electric Collective Pitch RC Helicopters - essential reading for any newbie rc heli pilot!
Coaxial RC Helicopter Controls
Coaxial rc helicopters have 2 sets of main rotors mounted one above the other, and no tail rotor.

The main rotors spin in opposite directions to each other, thus cancelling out each other's torque force. So, because there is no torque when both rotors are spinning at the same speed, the fuselage of the helicopter has no tendency to spin round in any particular direction.
Directional control is achieved by changing the speed of one of the rotors in relation to the other. In doing so, a small amount of torque is then generated and that force will naturally cause the helicopter to yaw one way or another, hence changing direction.
Coaxial rc helicopters are fixed pitch and so altitude is controlled by adjusting the motor speed and hence the main rotor RPM, thus changing the associated amounts of lift generated.
Less Controllable RC Helicopters
 There are some 2-channel rc helicopters around but they aren't very controllable and you need to be aware of this when considering buying such a radio control helicopter.
There are some 2-channel rc helicopters around but they aren't very controllable and you need to be aware of this when considering buying such a radio control helicopter.
The 2-channel helis have no pitch control whatsoever - only main and tail motor speed control, and sometimes this might only be a simple on/off function.
Their simplicity means they are cheap to buy, which is great, and they are still good fun to fly, but they don't give you an accurate experience of flying a radio control helicopter.
The downside to such helicopters is that the torque force is only vaguely compensated, and as a result the helicopter will often spin round during flight, particularly when motor speeds are changed.
But with some degree of trimming and tweaking, it is possible to get them flying in wide circles in a controlled way to produce some realistic looking flights, as my brother demonstrates in this video [opens Windows Media Player] with a Syma Dragonfly 2-channel helicopter.
With any 2-channel rc helicopter the controls are very basic and so stable, precise hovering is pretty much out of the question - but they're still good fun!
Flybarless RC Helicopter Control
As previously mentioned, a big change to radio control helicopter control is the advent of flybarless (FBL) systems.
The change is due to the technological advancements in recent years, allowing manufacturers to produce multi-axis electronic stabilization units.
These are essentially the same as the gyros used to soften the yaw control, except they work on cyclic and collective control.
A flybarless rc helicopter has a much more realistic look (since full size helis don't have flybars!) and the rotor head is marginally less complex, due to the lower component count.

Above: a modern rotor head on a flybarless rc heli.
Flybarless rc helicopters are increasingly common and I'm sure it won't be long before the flybar is condemned to the history books forever.
The important thing to remember when flying any kind of rc helicopter is safety. Even the soft plastic blades of a cheap 2-channel heli can do a lot of damage, and hurt.
It goes without saying that understanding how the primary rc helicopter controls influence the helicopter itself is of paramount importance, if you're to learn to fly your heli safely, properly and with confidence.
RC Helicopter Controls Glossary
Listed below are some of the more common terms that you'll need to know to get a better understanding of rc helicopter controls...
- Angle of Attack - the angle of the rotating rotor blades in relation to the air flowing over them, as viewed from the end of the blade.
- Coaxial - a type of helicopter that has two sets of main rotors, one mounted above the other, and no tail rotor.
- Collective pitch control - all main rotor blades are moved to the same pitch angle at the same time, thus increasing or decreasing the amount of lift evenly throughout the rotor disc.
- Cyclic pitch control - the angle of the rotor disc is changed to 'unbalance' the lift within the disc. As a result, the helicopter leans to the side that is experiencing less lift.
- Downwash - air that is forced downwards by the spinning main rotor blades.
- Flybar - short bar perpendicular to the main rotor blades, with small paddles at each end. Connected to the swash plate, the flybar tilt/twist influences the angle of attack of the rotor disc.
- Flybarless - electronic stabilisation technology that negates the need for a flybar.
- Ground Effect - when the heli is flying/hovering close to the ground and is effected by the downwash bouncing back off the ground.
- Gyro - a small electronic microprocessor-controlled device that makes minute and rapid adjustments to the tail rotor speed/blade pitch, to dampen out any unwanted yaw. Also now used on the pitch and roll axis in flybarless systems.
- Head speed - the speed in Revolutions per Minute (RPM) of the rotor head/blades.
- Main rotor - the horizontally mounted blades above the fuselage.
- Pitch angle - the angle of the rotor blades in relation to the horizontal, when viewed end-on.
- Rotor disc - the imaginary horizontal circle above the helicopter created by the spinning rotor blades.
- Rotor head - the central assembly from which the main blades extend.
- RX/ESC/Mixer - an rc receiver-looking component that incorporates the Rx, gyro, electronic speed control and pitch mixing capabilities where applicable.
- Swashplate - found at the base of the rotor head, it tilts in any direction to control the cyclic pitch of the rotor disc and moves up and down for collective control.
- Tail rotor - the vertically mounted blade at the very rear of the helicopter.
- Tail boom - the horizontal shaft that runs outwards from the main frame of the heli, to support the tail rotor assembly.
- Torque - a natural reaction to any spinning object. Spinning main rotor blades create torque, which forces the helicopter fuselage to spin round in the opposite direction to the blades.
- Yaw - the rotational movement of the helicopter about its vertical axis, controlled by the tail rotor.
Want to know some general rc flying terms? Try the rc flying glossary.